load robot
该项目基于ROS(melodic)框架对宇树Go1机器人进行仿真,对ros环境的配置不再赘述
创建ROS工作空间
mkdir -p quadruped-sim/src
cd quadruped-sim/src
catkin_init_workspace
cd ..
catkin_make
为了方便后续不用一直刷新环境,直接将setup.bash写入.bashrc文件里,运行如下
sudo gedit ~/.bashrc
source /home/li/ljyws/quadruped-sim/devel/setup.bash //在最后一行加入该行,注意自己的文件路径
source ~/.bashrc
使用下面一行验证是否添加成功
echo $ROS_PACKAGE_PATH
可以看到这里已经出现了我的工作空间,说明添加成功

下载模型
-
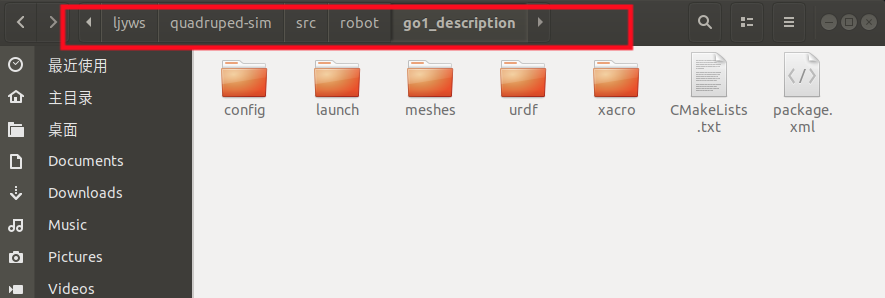
使用宇树的Go1模型,可以从unitree@github下载unitree_ros文件,将其中的robots目录复制到我们自己的工作空间下的src里,若考虑后续其他模型的复用可全部复制,这里我仅以go1模型作为仿真对象,因此将robot下其余机器人的模型包全部删去。如下图:
-
将unitree-ros目录下的unitree_gazebo以及也复制到我们的工作空间
-
在unitree@github下载unitree_ros_to_real,将里面的unitree_legged_msgs也放到我们的工作空间
后续我的文件夹中将unitree前缀的文件夹大多替换为go1为前缀,方便区分
编译
为了简化加载,也就是不再填充某些参数,在go1_gazebo包(也就是之前的unitree_gazebo包)中的normal.launch中删除了一些多余的,launch文件如下:
<arg name="rname" default="go1"/>
<arg name="robot_path" value="(find $(arg rname)_description)"/>
<arg name="dollar" value="$"/>
<arg name="paused" default="true"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- Debug mode will hung up the robot, use "true" or "false" to switch it. -->
<arg name="user_debug" default="false"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)"/>
<arg name="gui" value="$(arg gui)"/>
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- Load the URDF into the ROS Parameter Server -->
<param name="robot_description"
command="$(find xacro)/xacro --inorder '$(arg dollar)$(arg robot_path)/xacro/robot.xacro'
DEBUG:=$(arg user_debug)"/>
<!-- Run a python script to the send a service call to gazebo_ros to spawn a URDF robot -->
<!-- Set trunk and joint positions at startup -->
<node pkg="gazebo_ros" type="spawn_model" name="urdf_spawner" respawn="false" output="screen"
args="-urdf -z 0.6 -model $(arg rname)_gazebo -param robot_description -unpause"/>
使用catkin_make编译
运行
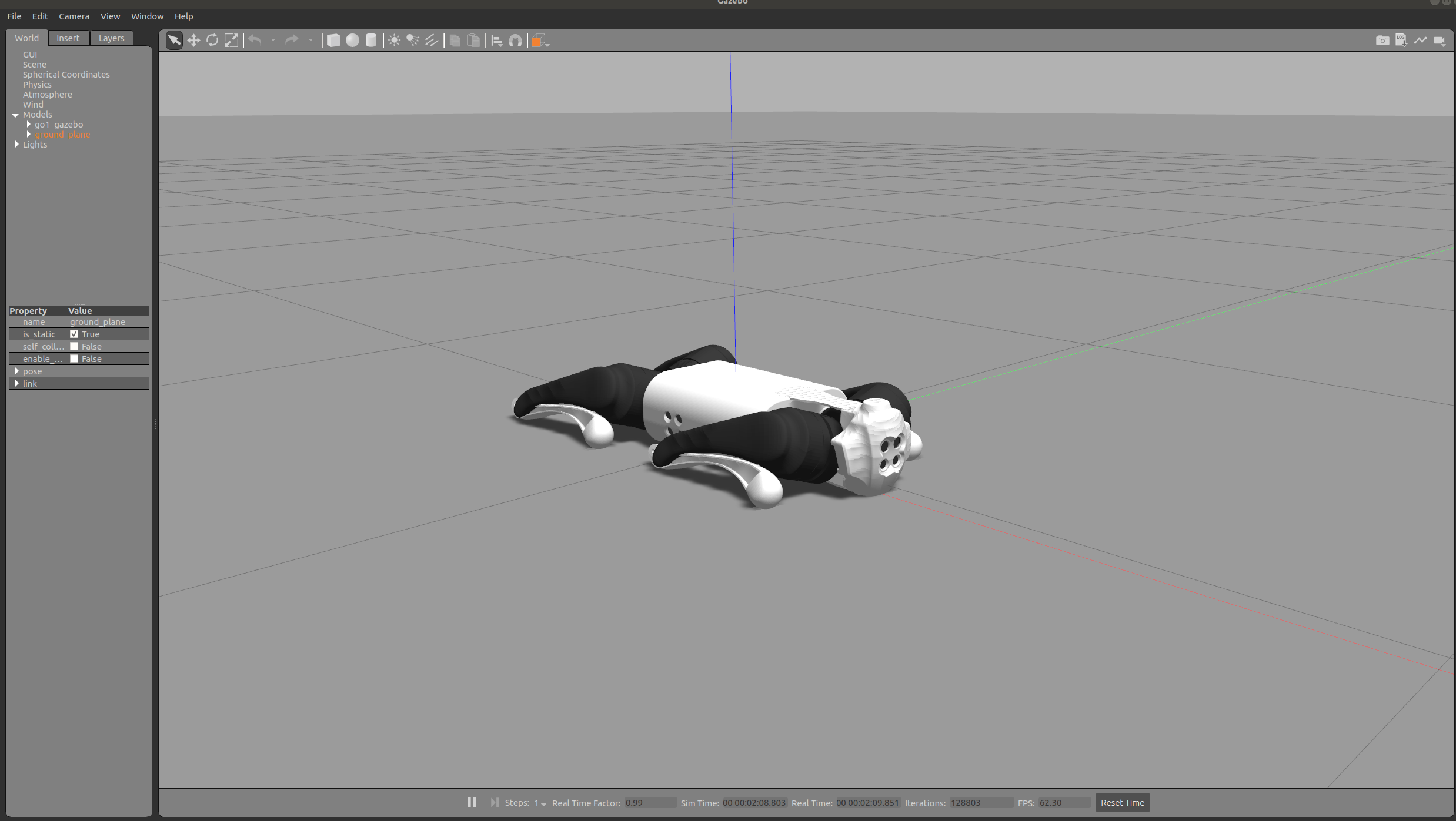
roslaunch go1_gazebo normal.launch
成功加载go1模型
加载控制器
直接使用宇树提供的控制器接口,即unitree_controller
首先复制unitree_legged_crntrol包到工作空间
修改normal.launch文件如下:
<launch>
<arg name="rname" default="go1"/>
<arg name="robot_path" value="(find $(arg rname)_description)"/>
<arg name="dollar" value="$"/>
<arg name="paused" default="true"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- Debug mode will hung up the robot, use "true" or "false" to switch it. -->
<arg name="user_debug" default="false"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)"/>
<arg name="gui" value="$(arg gui)"/>
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- Load the URDF into the ROS Parameter Server -->
<param name="robot_description"
command="$(find xacro)/xacro --inorder '$(arg dollar)$(arg robot_path)/xacro/robot.xacro'
DEBUG:=$(arg user_debug)"/>
<!-- Run a python script to the send a service call to gazebo_ros to spawn a URDF robot -->
<!-- Set trunk and joint positions at startup -->
<node pkg="gazebo_ros" type="spawn_model" name="urdf_spawner" respawn="false" output="screen"
args="-urdf -z 0.6 -model $(arg rname)_gazebo -param robot_description -unpause"/>
<!-- Load joint controller configurations from YAML file to parameter server -->
<rosparam file="$(arg dollar)$(arg robot_path)/config/robot_control.yaml" command="load"/>
<!-- load the controllers -->
<node pkg="controller_manager" type="spawner" name="controller_spawner" respawn="false"
output="screen" ns="/$go1_gazebo" args="joint_state_controller
FL_hip_controller FL_thigh_controller FL_calf_controller
FR_hip_controller FR_thigh_controller FR_calf_controller
RL_hip_controller RL_thigh_controller RL_calf_controller
RR_hip_controller RR_thigh_controller RR_calf_controller "/>
<!-- convert joint states to TF transforms for rviz, etc -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher"
respawn="false" output="screen">
<remap from="/joint_states" to="/$(arg rname)_gazebo/joint_states"/>
</node>
<!-- <node pkg="unitree_gazebo" type="servo" name="servo" required="true" output="screen"/> -->
</launch>
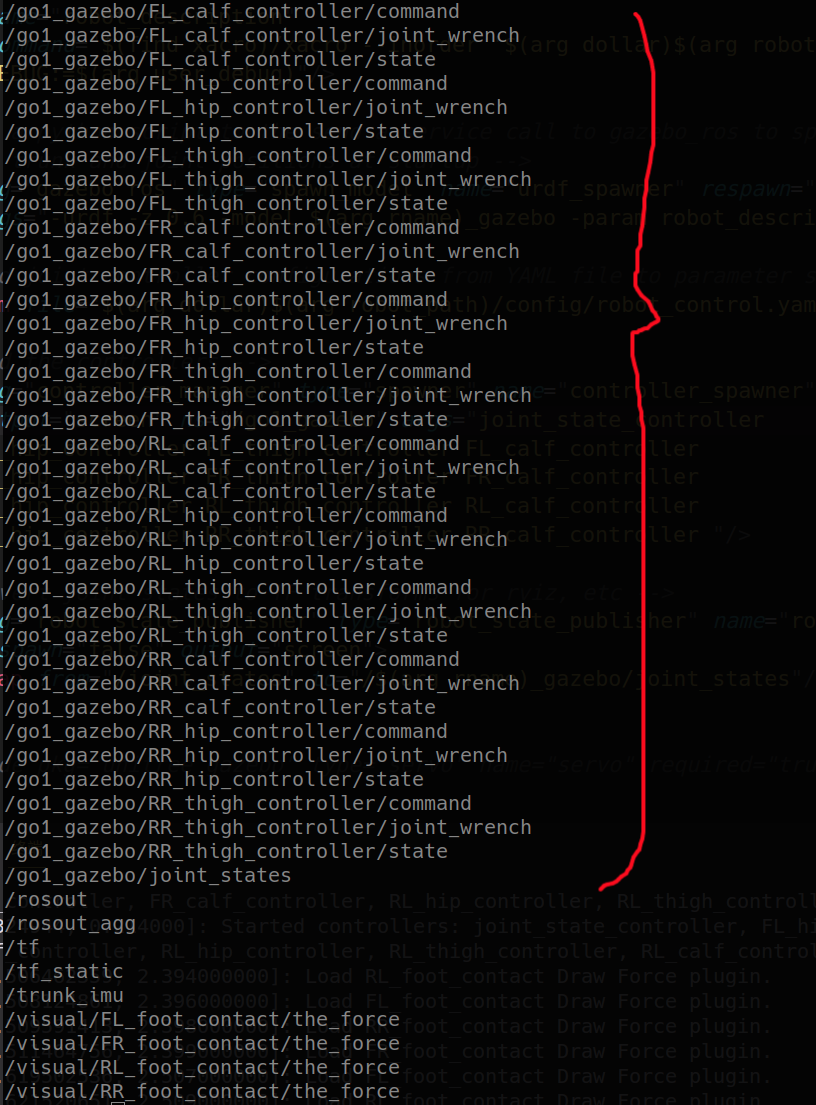
重新运行后
rostopic list
可以看到和各个关节的控制器都已经加载了进来