foot swing trajectory
采用MIT-mini-cheetah的方案,使用贝塞尔曲线方程
贝塞尔曲线
贝塞尔曲线是由法国工程师所发表的,一开始被广泛应用在汽车的主体设计上,后来被工程师以稳定数值的方法开发出该算法。直到目前,贝塞尔曲线仍被广泛应用在轨迹规划中
先给出公式:
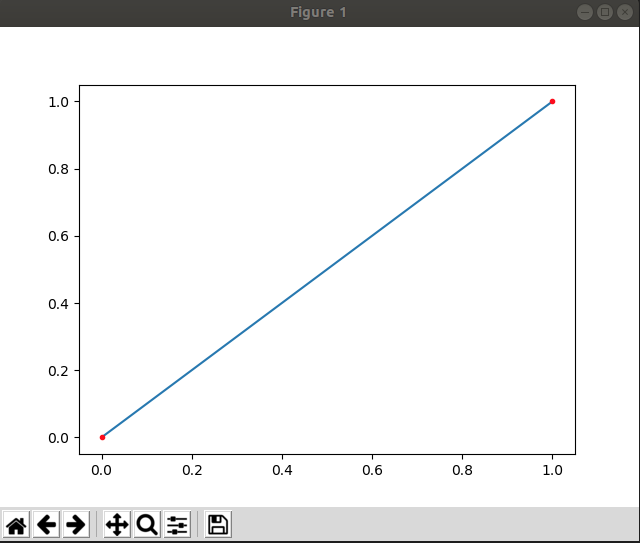
一阶曲线
当有两个点P0,P1时,设有一个点Pt,随着时间由P0运动到P1,则这个过程可以由:
利用pytho里的绘图工具
import matplotlib.pyplot as plt
import numpy as np
points = np.array([[0,0],[1,1]])
t = np.linspace(0,1,1000)
t = np.array([t,t]).T
B = (1-t)*points[0]+t*points[1]
plt.plot(B[:,0],B[:,1])
plt.plot(points[:,0],points[:,1],'r.')
plt.show()
可以看到
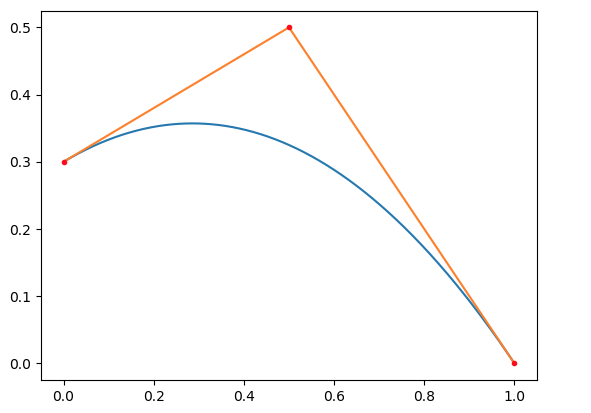
二阶曲线
公式为:
同样利用python工具来看一下
import matplotlib.pyplot as plt
import numpy as np
points = np.array([[0,0.3],[0.5,0.5],[1,0]])
t = np.linspace(0,1,1000)
t = np.array([t,t]).T
B = (1-t)*(1-t)*points[0]+2*t*(1-t)*points[1]+t*t*points[2]
plt.plot(B[:,0],B[:,1])
plt.plot(points[:,0],points[:,1])
plt.plot(points[:,0],points[:,1],'r.')
plt.show()
得到二阶贝塞尔曲线图像
同理可以一直画出更高阶的贝塞尔曲线
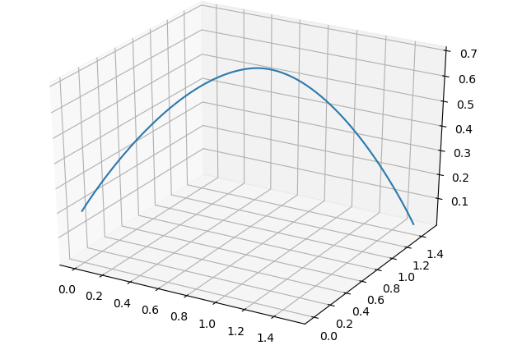
mini-cheetah中的贝塞尔轨迹
由于四足机器人足端在空间中运行,因此对于points是三维的,也就是我们规定这样来定义足端的位置p0[x0,y0,z0]
首先来看一下cheetah的源码中是如何做的:
template <typename T>
void FootSwingTrajectory<T>::computeSwingTrajectoryBezier(T phase, T swingTime)
{
_p = Interpolate::cubicBezier<Vec3<T>>(_p0, _pf, phase);
_v = Interpolate::cubicBezierFirstDerivative<Vec3<T>>(_p0, _pf, phase) / swingTime;
_a = Interpolate::cubicBezierSecondDerivative<Vec3<T>>(_p0, _pf, phase) / (swingTime * swingTime);
T zp, zv, za;
if (phase < T(0.5))
{
zp = Interpolate::cubicBezier<T>(_p0[2], _p0[2] + _height, phase * 2);
zv = Interpolate::cubicBezierFirstDerivative<T>(_p0[2], _p0[2] + _height, phase * 2) * 2 / swingTime;
za = Interpolate::cubicBezierSecondDerivative<T>(_p0[2], _p0[2] + _height, phase * 2) * 4 / (swingTime * swingTime);
}
else
{
zp = Interpolate::cubicBezier<T>(_p0[2] + _height, _pf[2], phase * 2 - 1);
zv = Interpolate::cubicBezierFirstDerivative<T>(_p0[2] + _height, _pf[2], phase * 2 - 1) * 2 / swingTime;
za = Interpolate::cubicBezierSecondDerivative<T>(_p0[2] + _height, _pf[2], phase * 2 - 1) * 4 / (swingTime * swingTime);
}
_p[2] = zp;
_v[2] = zv;
_a[2] = za;
}
在cheetah中,使用了一个插值运算库Interpolation,用来求解贝塞尔曲线。首先定义了起始点p0与终点pf以及抬腿高度height,调用库里的cubicBezier函数计算,cubicBezier函数实现为:
template <typename y_t, typename x_t>
y_t cubicBezier(y_t y0, y_t yf, x_t x)
{
static_assert(std::is_floating_point<x_t>::value,
"must use floating point value");
assert(x >= 0 && x <= 1);
y_t yDiff = yf - y0;
x_t bezier = x * x * x + x_t(3) * (x * x * (x_t(1) - x));
return y0 + bezier * yDiff;
}
也就是
在三维空间中,也就是
同时将整个摆动过程分成两段:上升和下降,分别引入抬腿高度进行z的计算,再最后覆盖到相应的位置,最终计算完成_p,_v,_a,分别表示位置、速度、加速度