Linux 中断
中断
几个概念
1.1 中断机制的目的和作用
- 外设异步通知CPU,比如定时器时间到、 或者收到一帧什么消息
- CPU之间,在多CPU系统,一个CPU要给另一个CPU发消息,可以发送IPI也就是�处理器间的中断
- 处理CPU异常,异常中断
- 早期系统调用是靠中断指令来实现
1.2 中断产生来源
- 外设,外设产生的中断信号是异步的,一般也叫硬件中断
- CPU,是指一个CPU给另一个CPU发送IPI,这种中断叫处理期间中断
- CPU异常,一般CPU把自己的异常按照能不能修复,分为三种异常,1.塌陷(trap),不需要修复,中断处理完后执行下一条指令,2.故障,需要修复也可能修复,中断处理完后重新执行之前的指令,3。中止,需要修复,但无法修复,中断处理完后内核会崩溃,比如缺页异常
- 中断指令,直接用CPU来产生中断信号。
1.3 中断的处理
a) 执行场景
在中断产生之间,是没有这个概念的,有了中断后,将CPU分为了两个执行场景,为进程执行场景 和 中断执行场景,进程的执行是进程执行场景,同步中断的处理也是进程执行场景,异步中断的处理是中断处理场景。理解为因为同步中断处理是当前指令触发的,可以看作是进程的一部分,而异步中断的处理和当前指令无关。
- 进程执行场景可以调度,可以休眠,而中断执行场景无法调度也无法休眠
- 在进程执行场景中可以接受中断信号,但在中断执行场景是屏蔽了中断信号的,所以如果中断执行场景的时间太长,会影响对新中断的信号的响应性,所以应尽可能的缩短中断执行场景,那么对异步的中断处理有几种方法:
1. 立即完全处理
对简单的异步中断完全处理
2. 立即预处理+稍后完全处理
对于处理起来比较费时间的采取立即预处理加稍后完全处理,其实后者就是线程中断化,在linux中,中断预处理部分叫做上半部,中断后处理叫做下半部。
1.4 中断向量号
不同的中断信号需要有不同的处理方式,所以需要靠中断向量号来区分,每一个中断信号都有一个中断向量号,中断向量号是一个整数,CPU收到中断信号后会根据信号的中断向量去查询中断向量表,根据向量表里去调用相应的中断处理函数。
特别的,对于CPU异常中断,其向量号是由架构规定的,而对于外设来说,是由设备驱动动态申请的。
arm下中断
2.1 中断控制器
ARM下提供了一个通用的中断控制器为GIC,主要是接受中断信号,处理后分发给CPU处理。以GIC v3版本为例,
2.1.1 GIC中断类型
- SGI:软件触发的中断,软件可以通过写GICD_SGIR寄存器,来触发中断,一般用于核之间通信,内核中的IPI就是基于SGI。
- PPI:私有外设中断,这是每个核心私有的中断,PPI会送到指定的CPU上
- SPI:公用的外部设备中断,也叫共享中断
2.1.2 GIC中断组成
- Distributor:spi的中断管理,将中断发送给Redistributor
-
打开或关闭每个中断,Distributor对中断的控制分成了两级,一个是全局中断的控制(GIC_DIST_CTRL),一旦关闭全局中断,那么任何中断源的中断事件都并不会被传递给CPU,另一个是针对各个中断源的控制,(GIC_DIST_ENABLE_CLEAR),关闭某某一个只会导致某中断事件不会分发到CPU。
-
控制将当前优先级最高的中断事件分发到一个或者一组CPU,当一个中断事件分发到多个CPU的时候,GIC内部逻辑应该保证只发给一个CPU
-
优先级控制
-
interrupt属性设定,设置每个外设的触发方式
-
interrupt group设定,设置�每个中断组,其中group0用于安全中断,支持快速中断请求FIQ和一般中断请求IRQ,group1用于非安全中断,只支持IRQ
- Redistributor:
- 启用和禁用SGI和PPI
- 设置SGI和PPI的优先级
- 将每个PPI设置为电平触发或边缘触发
- 将每个SGI和PPI分配给中断组
- 控制SGI和PPI状态
- 内存中数据结构和基地址控制,支持LPI的相关中断属性和挂起状态
- 电源管理支持
- CPU interface 传输中断给核
-
打开或关闭CPU interface向连接的CPU assert事件,对于ARM,CPU interface和cpu之间的中断信号线是nIRQCPU和nFIQCPU,如果关了中断,即便Distributor分发了一个中断事件到了CPU interface,也不会assert指定的核
-
中断的确认。核会向CPU interface应答中断,中断一旦被应答,Distribetor就会把该中断的状态从pending修改成active,或者pending and active,应答中断后,cpu interface就会deassert nIRQCPU和nFIQCPU信号线
-
中断处理完毕的通知,当interrupt handler处理完一个函数后,会向CPU INTERFACE的寄存器通知GIC,CPU已经处理完了该中断,这个动作一方面是通知Distributor将中断状态改为deactive,另外一方面,CPU interface 会 priority drop,从而允许其他的 pending 的中断向 CPU 提交
-
为 CPU 设置中断优先级掩码。通过 priority mask,可以 mask 掉一些优先级比较低的中断,这些中断不会通知到 CPU
-
设置 CPU 的中断抢占(preemption)策略。
-
在多个中断事件同时到来的时候,选择一个优先级最高的通知 CPU
2.1.3 中断路由
GIC v3使用一个hierarchy来标识一个具体的core
2.1.4 中断状态机
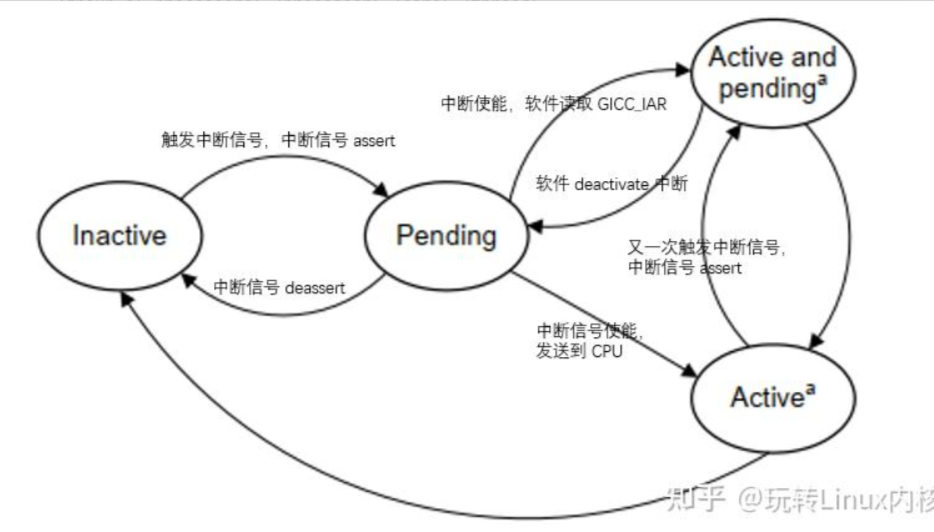
- Inactive:无中断状态,即没有pending也没有actice
- pending:由硬件或软件触发了中断,该中断事件已经通过硬件信号通知到了GIC,等待GIC分配到CPU处理
- active:CPU已经应答了中断请求,在处理中
- active and pending:当一个中断源处于active状态,同一中断源又触发了中断,进入pending状态
2.1.5 中断处理流程
- 外设发起中断,发送给Distributor
- Distributor将该中断发给相应的Redistributor
- Redistributor将该中断信息发送给CPU interface
- CPU interface产生相应的中断信号给处理器
- 处理器接受中断信号,处理中断处理函数
GIC控制器中断流程
3.1 中断注册
设备驱动中,获取到了IRQ的中断号后,通常使用request_irq/request_threaded_irq 来注册中断,其中前者用于注册普通的中断,后者用于注册线程化处理中断,而线程化中断主要是把中断上下文的任务搬到线程中,减少系统关中断事件。增强系统实时性。
3.2 中断的处理
当完成中断注册后,剩下就是等待中断信号的来临。 在ARM架构中,EL0是ARMv8-A架构中定义的四个异常等级(Exception Levels)之一,被称为无特权执行级别。在这个级别上运行的是普通的用户应用程序 。EL0是最低的异常级别,通常用于执行用户态的代码,这些代码没有特权去访问或修改关键的系统资源或配置 。在ARMv8架构中,随着异常等级编号的增加,软件的执行权限也相应增加,EL0作为最低等级,拥有的权限也最少 。在ARM架构中,EL0和EL1是必须实现的,而EL2和EL3是可选的。
此时假设在当前EL0运行一个APP,触发了一个EL0的IRQ中断,则处理器会先跳转到arm对应的异常向量表,以arm-64为例,
/*
* Exception vectors.
*/
.pushsection ".entry.text", "ax"
.align 11
SYM_CODE_START(vectors)
......
kernel_ventry 1, sync // el1 下的同步异常,例如指令执行异常、缺页中断等
kernel_ventry 1, irq // el1 下的异步异常,硬件中断。1代表异常等级
kernel_ventry 1, fiq_invalid // FIQ EL1h
kernel_ventry 1, error // Error EL1h
kernel_ventry 0, sync // el0 下的同步异常,例如指令执行异常、缺页中断(跳转地址或者取地址)、系统调用等
kernel_ventry 0, irq // el0 下的异步异常,硬件中断。0代表异常等级
kernel_ventry 0, fiq_invalid // FIQ 64-bit EL0
kernel_ventry 0, error // Error 64-bit EL0
......
#endif
SYM_CODE_END(vectors)
在上面的异常向量表中,设置了 各种异常的入口,kernel_ventry展开后,可以看到有效的异常入口又两个同步异常el0_sync,和el1_sync和两个异步异常el0_irq和el1_irq。
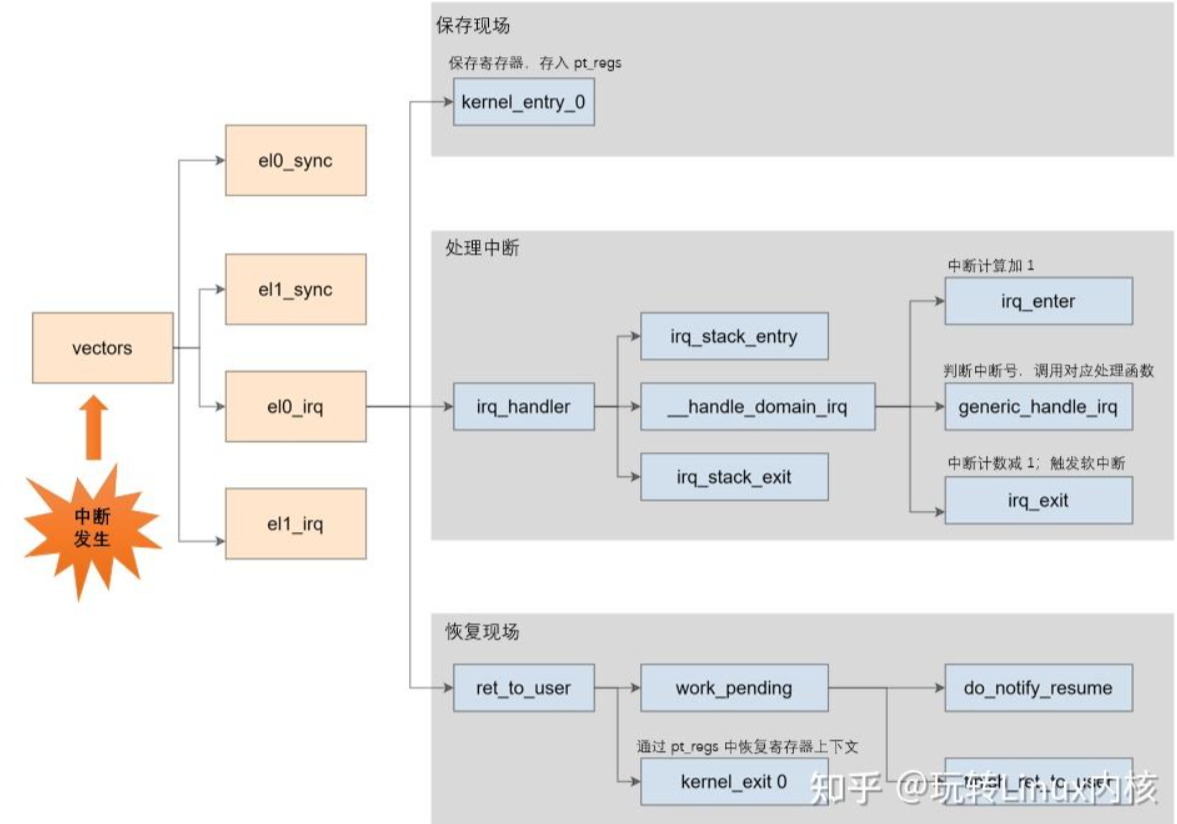 可以看到中断处理分为三部分:保护现场,中断处理,恢复现场。以el0_irq为例:
可以看到中断处理分为三部分:保护现场,中断处理,恢复现场。以el0_irq为例:
3.3 保护现场
kernel_entry 0,其中 kernel_entry 是一个宏,此宏会将 CPU 寄存器按照 pt_regs 结构体的定义将第一现场保存到栈上。
.macro kernel_entry, el, regsize = 64
.if \regsize == 32
mov w0, w0 // zero upper 32 bits of x0
.endif
stp x0, x1, [sp, #16 * 0]
stp x2, x3, [sp, #16 * 1]
stp x4, x5, [sp, #16 * 2]
stp x6, x7, [sp, #16 * 3]
stp x8, x9, [sp, #16 * 4]
stp x10, x11, [sp, #16 * 5]
stp x12, x13, [sp, #16 * 6]
stp x14, x15, [sp, #16 * 7]
stp x16, x17, [sp, #16 * 8]
stp x18, x19, [sp, #16 * 9]
stp x20, x21, [sp, #16 * 10]
stp x22, x23, [sp, #16 * 11]
stp x24, x25, [sp, #16 * 12]
stp x26, x27, [sp, #16 * 13]
stp x28, x29, [sp, #16 * 14]
.if \el == 0
clear_gp_regs
mrs x21, sp_el0
ldr_this_cpu tsk, __entry_task, x20
msr sp_el0, tsk
其中enable_da_f是关闭中断,保护现场主要的工作就是:
- 保存PSTATE到SPSR_ELx寄�存器
- 将PSTATE的DAIF全部平壁
- 保存PC寄存器的值到ELR_ELx寄存器
3.4 中断处理
保护过现场后,会跳入irq_handler
/*
* Interrupt handling.
*/
.macro irq_handler
ldr_l x1, handle_arch_irq
mov x0, sp
irq_stack_entry //进入中断栈
blr x1 //执行 handle_arch_irq
irq_stack_exit //退出中断栈
.endm
这里主要做了三个动作:
- 进入中断栈
- 执行中断控制的handle_arch-irq
- 退出中断栈
中断栈用来保存中断上下文,中断发生和退出的时候调用irq_stack_entry和irq_stack_exit来进入和退出中断栈,中断栈是内核启动的时候创建的,内核在启动的时候会给每个CPU创建一个per cpu的中断栈,也就是执行顺序:start_kernel->init_IRQ->init_irq_stacks.
那么handle_arch_irq又指向哪里? 在内核启动过程中初始化gic控制,会设置具体的handler,gic_init_bases->set_handle_irq将handle_arch_irq指向了gic_handle_irq函数,所以最终会进入gic_handle_irq,在这个函数里:
- 读取GICC_IAR寄存器,获取hwirq
- 外设触发的中断,硬件中断号 0-15 表示 SGI 类型的中断,15-1020 表示外设中断(SPI或PPI类型),8192-MAX 表示 LPI 类型的中断
- 中断控制器的中断处理主体
- 软件触发的中断
- 核间交互触发的中断
其中中断控制器处理主体:
int __handle_domain_irq(struct irq_domain *domain, unsigned int hwirq,
bool lookup, struct pt_regs *regs)
{
struct pt_regs *old_regs = set_irq_regs(regs);
unsigned int irq = hwirq;
int ret = 0;
irq_enter(); ------(1)
#ifdef CONFIG_IRQ_DOMAIN
if (lookup)
irq = irq_find_mapping(domain, hwirq); ------(2)
#endif
/*
* Some hardware gives randomly wrong interrupts. Rather
* than crashing, do something sensible.
*/
if (unlikely(!irq || irq >= nr_irqs)) {
ack_bad_irq(irq);
ret = -EINVAL;
} else {
generic_handle_irq(irq); ------(3)
}
irq_exit(); ------(4)
set_irq_regs(old_regs);
return ret;
}
- irq_enter(); 进入中断上下文
- irq = irq_find_mapping(domain, hwirq);根据hwirq来查找linux中断号
- generic_handle_irq(irq); 也就是
static inline void generic_handle_irq_desc(struct irq_desc *desc)
{
desc->handle_irq(desc);
}
通过中断号找到全局中断描述符数组irq_desc[NR_IRQS],然后调用该中断的action函数 4. irq_exit(); 退出中断上下文
3.5 恢复现场
- disable中断
- 检查在退出前有没有需要处理的事情
- 将一开始压栈的pt_regs弹出,恢复现场
Linux中的中断API函数
一、中断号
在linux中,使用一个int变量表示中断号其中有:
- 私有外设中断(PPI):中断号为16-31
- 共享外设中断(SPI):中断号为32-1020,对于imx6ull,实际支持的SPI中断号有128个,也就是ID为32-159
- 软件中断(SGI):通常为0-15
二、request_irq函数
在liunx中,要使用某个中断是需要申请的,使用request_irq函数用于申请中断,但是这个函数可能会导致睡眠,因此不能在中断上下文或者其他禁止睡眠的位置使用request_irq函数,函数原型:
int request_irq(unsigned int irq,
irq_handler_t handler,
unsigned long flags,
const char *name,
void *dev)
其中:
- irq:要申请的中断号
- handler:中断处理函数
- flags:中断标志,都定义在include/linux/interrupt.h里,一些常用的有:
| FLAG | 描述 |
|---|---|
| IRQF_SHARE | 多个设备共享一个中断号的时候,共享的所有中断都指定这个中断标志,并使用request_irq里的dev参数来区分 |
| IRQF_ONESHOT | 单次中断,只执行一次 |
| IRQF_TRIGGER_NON | 无触发 |
| IRQF_TRIGGER_RISING | 上升沿触发 |
| IRQF_TRIGGER_FALLING | 下降沿触发 |
| IRQF_TRIGGER_HIGH | 高电平触发 |
| IRQF_TRIGGER_LOW | 低电平触发 |
- name:中断名字,设置后可以在/proc/interrupts文件里看到
- dev:为设备结构体,会传递到irq_handler_t的第二个参数
三、free_irq函数
使用中断时候request,同理使用完后,就要free掉,函数原型:
void free_irq(unsigned int irq, void *dev)
其中:
- irq:要释放的中断
- dev:设备
四、中断处理函数
在使用request_irq的时候,有一个参数是中断处理函数,格式如下:
irqreturn_t (*irq_handler_t)(int, void*)
其中,第一个参数是中断号,第二个函数是通用指针,通常和request_irq函数中的dev参数保持一致,返回类型是irqreturn_t,这是一个枚举类型,如�下:
enum irqreturn {
IRQ_NONE = (0 << 0),
IRQ_HANDLED = (1 << 0),
IRQ_WAKE_THREAD = (1 << 1),
};
五、中断使能与禁止
使能
void enable_irq(unsigned int irq)
禁止
void disable_irq(unsigned int ir)
其中,禁止函数要等到当前在执行的中断处理函数执行完才返回,因此要保证不会产生新的中断,并确保所有已经开始执行的中断处理函数全部退出,在这种情况下有另一种禁止函数:
void disable_irq_nosync(unsigned int irq)
若需要关闭或者使能全部的中断系统,则使用:
local_irq_enable()
local_irq_disable()
但此时有一种情况:如果A任务用local_irq_disable关闭了全局中断10s,当运行第二秒的时候,B任务也用了下local_irq_disable,关闭全局中断3s,3秒以后B任务又使用了local_irq_enable函数打开全局中断,此使刚过去5秒,但是中断被打开了,所以为了避免这种情况,B任务不能粗暴的直接local_irq_enable,而是应该将中断状态恢复到之前的状态,这时候就要用:
local_irq_save(flags)
local_irq_restore(flags)
上半部与下半部
对于中断处理函数来说,我们尽可能要运行时间短,不在中断中处理过多的任务,然而可能在实际使用时,无法避免这些问题,因此引入了一个上半部和下半部的概念。 在上半部处理一些简单、时间短的任务,比如初始化啊之类的,把耗时间的任务放到下半部就处理。 操作系统在执行处理函数时,会执行完上半部后,就返回,然后系统在调度中在去执行下半部的部分。
上半部
写在中断处理函数里的任务就是上半部
下半部
实现下半部的方法有以下:
- softirq :软中断
- tasklet :是将下半部通过一个结构体去管理,然后将该结构体放入内核提供的一个链表中,系统去调度,tasklet中的方法不能休眠,运行在中断上下文
- workqueue : 是将下半部通过一个结构体去管理,然后将结构体放入到内核提供的一个队列中,系统去调度,同时workqueue其中的方法可以休眠,运行在线程上下文